In preparation · IEEE RA-L / ICRA 2027
- Certified Safe Go-Around for UAV Navigation in Dynamic Crowds
- Ye, B., & Boyle, D. — first-author manuscript
You can also call me Stephen if you wish
I work across robotics, computer vision and embodied AI—bridging learning-based perception with verifiable, safe planning. My current research builds certified safety layers for UAV navigation in dynamic crowds; past work spans mixed-reality teleoperation, open-vocabulary 6D pose estimation, and vision–language–action policies for humanoid manipulation.
My work sits at the intersection of robot navigation, manipulation, and perception. I build systems that understand objects, predict human motion, and come with guarantees about how they behave. Recent work spans a certified safety layer for quadrotors flying near pedestrians (Imperial, with Dr David Boyle), humanoid teleoperation and vision–language–action deployment at Midea Group, and embodied-intelligence research at KUKA Robotics.
I’m interested in how technical systems can feel gentle—how robotics, sensing, and datasets can be shaped as quiet, legible tools rather than noisy complexity. My work often focuses on interaction behaviours: micro-feedback, spatial clarity, and the visual organisation of diagrams and control surfaces.
I prototype with a mixture of embedded controllers, RGB-D cameras, motion sensors, and computational pipelines, supported by clean editorial UI layers for debugging, teleoperation, and documentation.
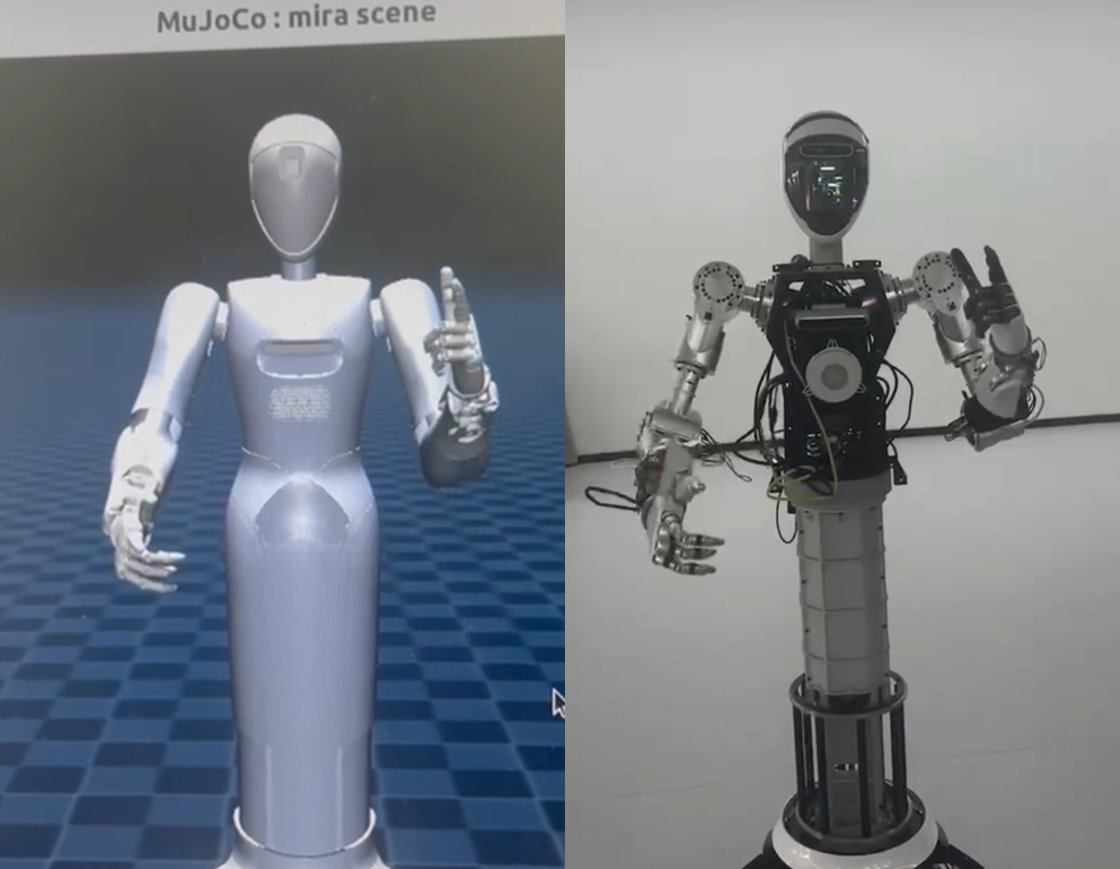
Apple Vision Pro-driven control system translating human gesture into humanoid behavior. Real-time inverse kinematics, depth-based collision avoidance, and haptic feedback loops for intuitive robot manipulation.
View Project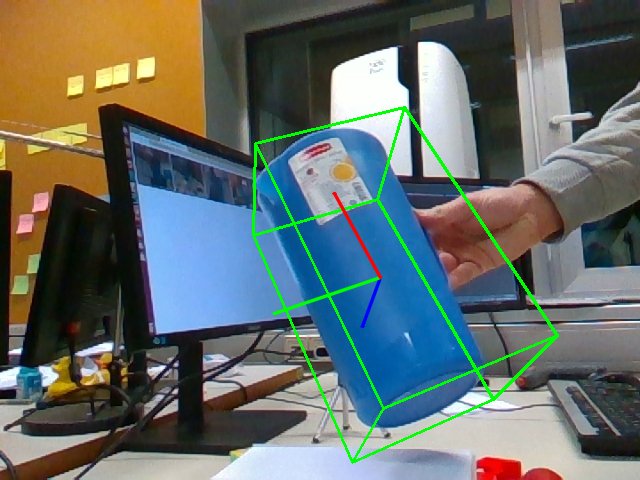
Open-vocabulary object understanding from a single demonstration. Synthetic dataset generation in Blender, real-time tracking refinement via Kalman filters, enabling robots to manipulate novel objects without retraining.
View Project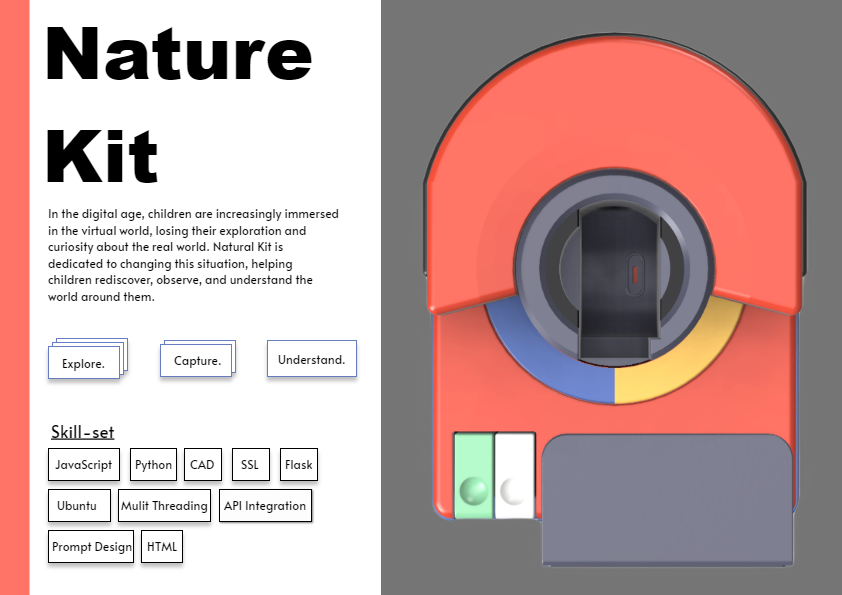
Teachable behavior systems for children aged 0–6. Embedding sensor feedback, soft material interfaces, and habit formation through calm interaction patterns that grow with the child.
View ProjectMy ongoing work moves between engineering and narrative systems, exploring how tools can be designed with clarity, emotional distance, and precision—similar to the logic of editorial design.
Imperial College London · Dyson School of Design Engineering
Focus on Mathematics, Physics & Computing
I maintain a small archive of experiments, diagrams, code notes, dataset runs, and speculative sketches—updated whenever a result feels worth capturing.